FRC 2023 “Charged Up” Challenge
“CHARGED UP” Challenge
My robotic journey with team 8069 started at the January kick-off event, where I watched the “Geared Up” challenge together with some team members and mentors in the Craftsman conference room. When the rest of the team, who attended the official kick-off event, joined us, we began reviewing the Game Manual and discussing the team’s season strategy.
![]()


A week before the kick-off, our team sat down to brainstorm ideas for the robot design. In the image above, you can see different ideas I had during the first few weeks of the season.
A few students, including me, suggested using a swerve drive with a more complex robot design, allowing us to be fast yet precise on the field. However, given that most of the team lacked significant technical knowledge, we chose a more straightforward design approach to ensure everyone was on the same page. As one of the most experienced team members, I took the initiative to train novice roboticists by sharing my technical skills with them so they would be ready to achieve greater seasonal goals in the future.
The team chose a tank drive train, which offered maneuverability but was easier for those without much experience to grasp. I took the captain of our drive train team. I led them through the assembly and programming of a simple yet relatively effective drive train. Most importantly, it was an opportunity for students to learn about basic drive trains and how to achieve the desired results.

Testing arm prototype
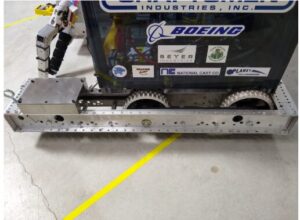
A few weeks in, we had a prototype drivetrain and an arm mounted on top of the drivetrain. The arm would pivot up and down to allow us to reach and place game elements (Cones) on top of poles to score points. Because we were still in the prototype stage, we used scrap metal to build the arm and clamped it to the drivetrain, allowing us to adjust its mounting until we found the ideal spot.
Once we found the proper placement for the arm, we had it fabricated by one of our team sponsors, who offered to create and donate the part to our team from excess materials they had on hand.
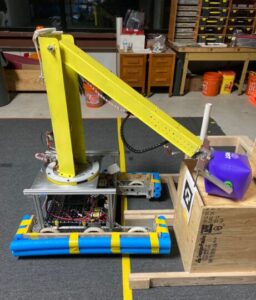
Testing the arm to reach the lower level

Testing the arm to reach the higher level
With this being the case, though the arm was hefty and bulky because it was made from leftover materials, we made the best of it and very much appreciated the donation, as we didn’t have the resources to create the part ourselves. Inside the arm, we created a linear actuator utilizing a lead screw. This allowed us to gain the required reach to score on all three levels of the scoring element.
After we had a basic idea of the mechanisms we would have on our robot, it was time to add a grabber to the end of our arm, allowing us to pick up both cones and cubes off the playing field. I led a group of students in building a grabber. After some talks and simple prototypes, we ended up building a simple grabber made out of two linear servos, which pushed and pulled small arms mounted to a linear slide. This allowed the arms to move in parallel, giving us the maximum contact with our game elements. At the end of the small arms, we have ball bearings attached with rubber wheels glued to them. This allows picking up both cubes and cones off the ground. Because we have ball bearings at the ends, the grabber can pick up cones and keep them upright, whereas a standard grabber wouldn’t. Doing this makes it very easy to place the cones on the scoring poles.
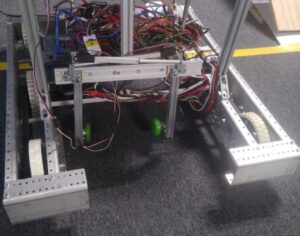
Grabbing mechanism, V.1

Grabbing mechanism, V.2
While our previous grabber was very advanced, it worked well. However, with our current programming skills, it was relatively slow as the linear servos had to move at the same speed and stay aligned to each other. This complicated the grabber’s programming, and the team decided against this design. Instead, we went with a single brushless motor attached to a moving arm.
Our simple mechanism was mounted to a static assembly, which allowed only one side of the grabber to move. This was easy to visualize and operate, but we lost a lot of functionality since the cones wouldn’t automatically stay upright, and we couldn’t pick them up off the ground as easily. However, the team thought it was in our best interest to use them, since most students had experience with them.

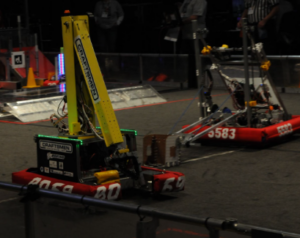
After 8 weeks, starting from the first week of January to March 2023, we competed in the St. Louis Regional, placing 31st out of 43 teams. Despite not ranking as high as we had hoped, the team learned valuable lessons for future seasons. I was proud of what we accomplished, and the students I mentored learned so much in such a short amount of time.
I look forward to seeing what they accomplish in future seasons. That said, I spoke with everyone on the team, especially the mentors. After that season was over, I decided to join a more advanced team so I could better utilize my talents and further expand my technical and design skills. My move between teams was very smooth without hurting anybody’s feelings. Everyone wished me the best.
Mentors understood my motivations and approved my decision. They even wrote a very thoughtful farewell email thanking me for all the help I had given them. To this day, I still watch that young team grow and use the same skills and techniques I taught them during my time on team “SuperHornets”.

Our team is in a pit at the FRC St. Louis Regional Competition